ホーム>研究概要>ロボティクス>深層強化学習の多段階層化による運動生成
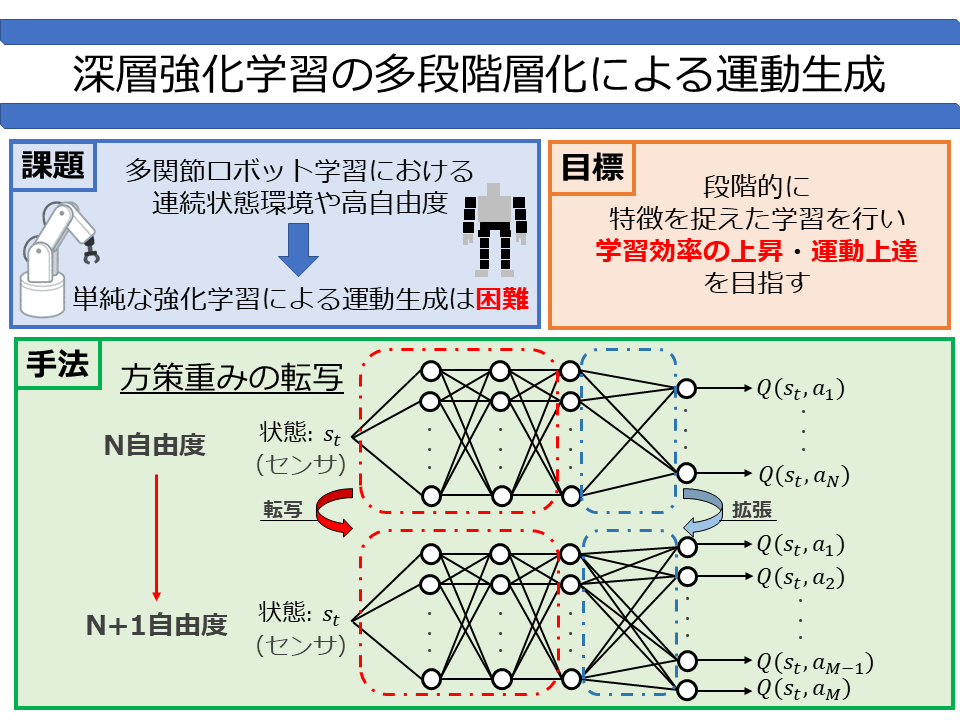
深層強化学習の多段階層化による運動生成
高自由度ロボットにおける強化学習は連続状態空間であることや、膨大な学習量が必要であることから困難であると言われています。そこで、深層強化学習を用いて、低自由度で動作の特徴をとらえつつ高自由度にて目標の動作を達成する段階的な学習システムの実現を目指しています。
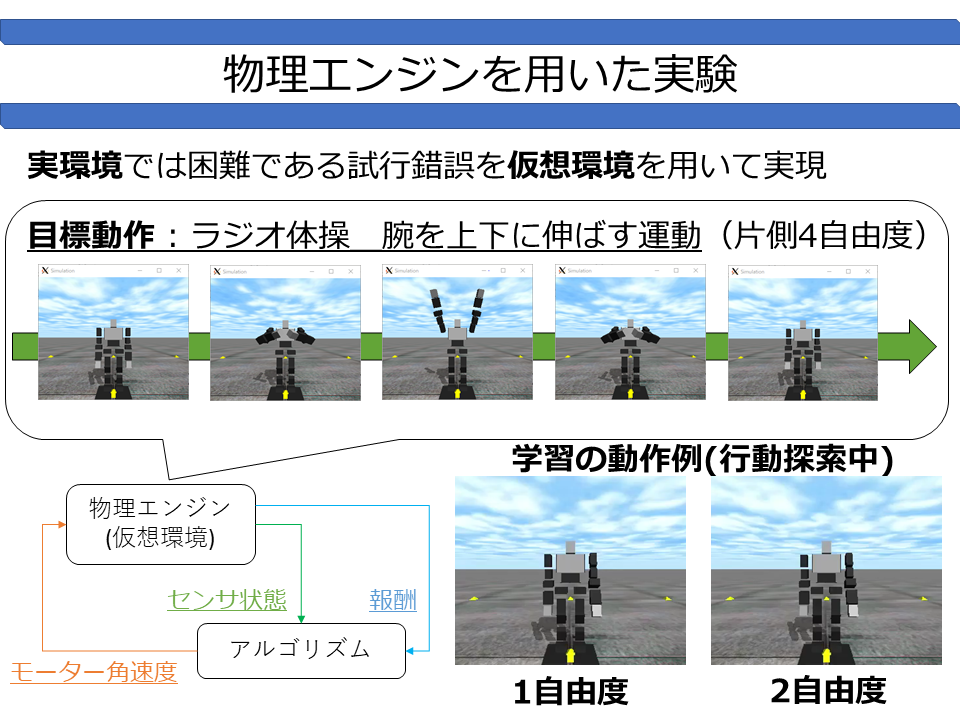
学習の動作例(行動探索中) 1自由度
学習の動作例(行動探索中) 2自由度