ホーム>研究概要>ロボティクス>基底関数ネットワークの部分更新に基づくトルク制御関節ロボットの運動学習
基底関数ネットワークの部分更新に基づくトルク制御関節ロボットの運動学習
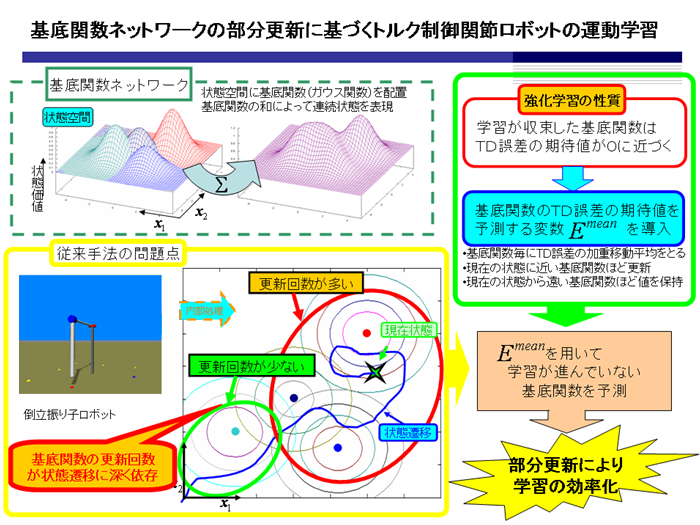
実環境内における強化学習として,基底関数ネットワーク(RBFnet)を用いた手法が広く用いられています. しかし,RBFnetを用いた強化学習では基底関数ごとの学習の頻度に偏りができるという問題があります. そこで,本研究では真の状態価値との誤差が発生している基底関数を明確にすることにより,効果的に状態空間を修正する手法を提案します.