ホーム>研究概要>ロボティクス>部分隠蔽を考慮した姿勢推定
部分隠蔽を考慮した姿勢推定
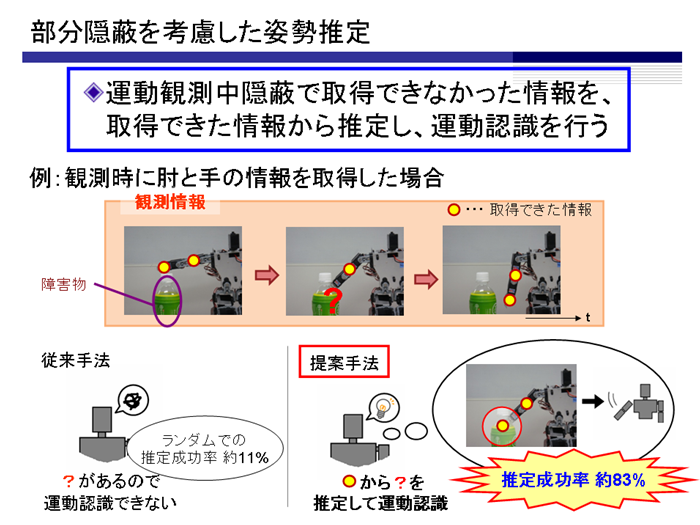
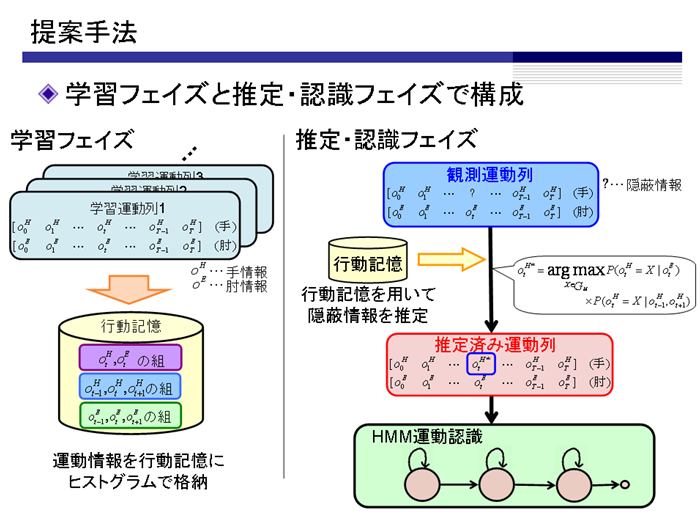
ロボットは運動観測時に,必要な情報が隠蔽によって取得できなかったとき,姿勢が特定できずに正確な運動認識ができません.そこで本研究は,隠蔽前後の観測できた姿勢や,隠蔽されなかった体の部位情報を用いることで隠蔽箇所の姿勢を推定し,推定した姿勢を利用して運動認識を行う手法を考えています.